131 1300 0010
作为工业生产线基础的传动设备,一般都采用“交流电动机+机械减速机构”的方式来驱动,简单适用且价格低廉。但是今天,由机械减速机构带来的不利影响,如齿轮箱等的油污泄漏、机械磨损及日常维护等,正在引起人们的关注,特别是在食品、卫生、制药等行业。一种采用低转速、大力矩无刷直流电机的直驱电机,取代了机械减速机构,将电机与传动目标直接耦合,在系统性能和成本上具有更多的竞争优势。
驱动器结构
与交流感应电动机相比,作为无刷直流电动机的直驱电机由于电动机转子的特殊结构,需要特别的驱动器才能运行,驱动器的电气结构如图1所示。
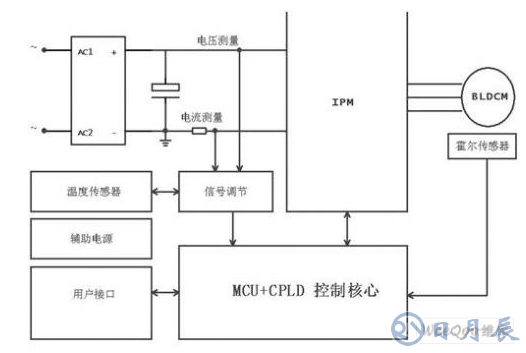
F1: 直驱电机驱动器的电气结构
辅助电源将交流电源转化为+5/15V直流电源,提供给系统及智能功率模块使用;用户接口提供了一个驱动系统与操作者的沟通渠道,操作者通过它来调节电机的运行速度和方向,同时电机及驱动器的工作状态也通过它传递给操作者;霍尔传感器作为位置传感器,将无刷直流电动机转子的物理位置信息提供给控制核心;控制核心通过智能功率模块(IPM)将电力以合适的方式传递给电机,控制电机的运行方向和速度;系统同时也检测输入电压、电机的负载电流和驱动器的工作温度,获得电机的工作环境和工作状态,这些将参与电动机的控制并且在必要时将系统切换到保护状态,使系统有更高的可靠性。驱动器的设计将满足如下目标:
1)小型化 由于一体化直驱电机的产品目标是将电机与电机驱动器合为一体,驱动器的体积和散热是首要的考虑焦点;
2)可靠性 一体化的直驱电机将面对严酷的工业应用环境的挑战,产品可靠性在设计之初就应该给予充分的重视;
3)人性化 一体化直驱电机的操作者主要是工厂现场的工人,因此它的用户接口设计将更多地考虑人性化和简单化。
硬件设计
控制核心 采用Atmel公司的ATmega88 MCU与Lattice公司的M4A5 CPLD。
1) Mega88内置高精度8MHZ RC振荡器,在-40℃~80℃温度范围,其变化在±2.5%内。RC振荡器以其非常简单的结构,为系统的目标应用提供了适用、廉价、高可靠性的时钟源;
2) 512B的EEPROM为许多用户参数的设置提供了保存的空间,电机表现为具有记忆功能。就速度设置而言,省略了通过电位器来进行设置和记忆的方式,而采用较简单的按键开关;
3) 六通道PWM方便了电机速度控制的调节,特别是它的16位定时器/计数器1,具有双缓冲的输出比较寄存器,驱动器用它来产生无干扰脉冲、相位正确的可变频率的PWM。直驱电机驱动器采用120°驱动方式,不需要PWM的互补输出结构。系统用CPLD构建六路PWM输出信号互锁,用硬件方式保证IPM的同一桥臂不会直接导通;MCU根据霍尔传感器提供的转子位置信息将PWM信号进行切换和分配,驱动IPM;
4) 8路10位ADC方便了对电机的工作电压、负载电流和工作温度的数据采集,MCU内置的1.1V能隙电压基准的使用,使驱动器在严酷工作环境运行的同时,还能随时修正ADC结果,保证较高的系统精度;
5) 用CPLD来构建控制系统所需要的逻辑电路,除了对IPM的PWN驱动信号进行切换、分配和互锁外,还将IPM的过流保护信号进行锁存,以单稳态触发的方式封锁IPM的驱动信号,并将过流信息传递给MCU,使系统安全进入故障保护状态;在系统上电过程中,系统的直流母线处于软启动阶段,以保证较大的电源滤波电解电容在充电过程中不会对前端的整流器件造成损坏,在这一阶段,CPLD将禁止IPM的输出以免过大的电机工作电流损坏软启动电路;而CPLD的在线编程(ISP)特性,也使得系统在开发和生产部署时更为灵活。
辅助电源 采用PI公司TinySwitch-Ⅲ系列TNY275构成的反激式开关电源,将由AC220V输入得到DC310V直流电变换为15V直流电,主要供给IPM和软启动电路中的继电器。15V再经过MC34063DC/DC降压变换为5V,供控制系统使用。辅助电源的获得都是通过开关变换的方式进行,在提高电源效率、降低热损耗的同时,也有效地减少了驱动器的体积。
IPM接口 同样是出于小型化和可靠性的需求,设计中选用Sanken公司450V/15A的IPM SMM1003。(1)IPM采用高电平驱动接口,内置了下拉电阻,以保证系统在上电/掉电等不确定状态下的可靠性;由CPLD输出的PWM驱动信号经R23~R28(100Ω)和C17~C22(470Pf)组成的滤波器滤波后驱动IPM,可以提高电力电子部分的抗扰性。由滤波器带来的驱动信号时间延迟为0.05us左右,相对于4~8KHZ的电力载频、125~250us的载波周期而言,是可以忽略不计的;(2) IPM内置的分流电阻作为电流传感器用来检测流过IPM的电流,这一电流信息与电动机的工作电流有对应关系,被放大后提供给控制核心,用来控制系统的输出功率级别,同时检测电动机的负载大小,判断电机的工作状态。当电流值大于保护极限时,IPM将被触发进入过流保护状态,关断所有IGBT。
用户接口 驱动器的用户接口分为近端接口和远端接口。速度调节按键K2和工作状态显示LED为近端接口,位于电机的驱动器上,相对而言,它们的工作环境要好一些,直接使用电平驱动方式;而电机的正反转和启动/停止控制可能需要频繁地操作,有可能需要在离电机较远而离操作者较近的控制台加以控制,属于远端控制,这些控制信号将面临更多的现场干扰,选用电流驱动方式可以有效地提高信号的可靠性。微控制器的PD0端口上4.7kΩ的上拉电阻使PC817光耦的输出三极管饱和电流值被设定在1mA左右。当远端开关K1闭合时,在开关回路中需要流过大于0.5mA的电流(与光耦的电流传输比CTR有关),PD0端口才会被拉低,而这种级别的无线耦合干扰即使在工业现场也是很少的,上拉电阻越小,上拉强度越强,相当于远端输入回路的输入阻抗越小,这种远端接口的抗干扰能力也就越强。
系统保护 系统通过检测电网电压实现过电压/欠电压保护。由于电机是感性负载,IPM的开关动作将引发由电感负载引起的较高开关关断毛刺电压。而在电网过电压时,这种毛刺电压加上直流母线电压可能会非常高,以至于对IPM造成损坏;欠电压有可能会使15V辅助电源不稳定,影响IPM的正常工作。因此,在过电压/欠电压时退出工作状态是必要的。
无刷直流电机的转子为永磁体结构,在过大的外加磁场作用下有可能会被退磁而损坏,必要的极限电流限制可以有效规避这一风险。控制器通过密切监视系统电流,及时地调节PWM的占空比,使电机工作在安全的工作范围。
由于应用于工业环境,当使用环境温度较高或电机工作环境通风散热不畅时,较高的工作温度对驱动器的电子元器件特别是自身也产生较多热量的IPM极为不利,检测驱动器的工作温度是必需的。当系统检测到高于80℃的散热器温度时,驱动器会切换到过热保护模。
软件设计
智能PI速度控制 一体化直驱电机通过霍尔传感器获得定子驱动的换相信号,对换相信号的时间间隔进行测量和数字滤波,可以得到电机的平均速度。与直流有刷电动机一样,调节电动机定子的平均电压就可以调节电动机的速度。
直接驱动电机的速度调节范围被设计为每分钟10~200转,在传动设备的应用中,对动态特性的要求并不高,速度的控制采用了PI控制算法。为了更好地对电机的速度进行控制,系统将会根据电机的运行状态,运用不同控制算法。
1)积分调节PI控制 当电机处于启动加速、减速停止或正/反转切换阶段时,系统的速度控制偏差e(t)将会很大,容易造成PI运算的积分积累过快,从而引起速度的超调和振荡。因此有必要根据速度的控制偏差和不同的负载状态改变PI调节器的积分参数;
2)积分遇限削弱PI控制 任何时候控制器还会根据上一次的PI调节器的输出来决定当前的PI调节器的积分动作。当上一次的PI调节器输出已经正向饱和时,则只有负的速度控制偏差会被积分;反之,只有正的速度控制偏差会被积分。
这两种控制算法的应用都是根据电机的运行状态进行的,一个由运行状态和速度控制偏差共同决定的PI控制算法的积分参数运算模块被应用在PI调节器中,速度的PI调节器将更智能化。
载频摆动 为降低驱动器的开关损耗和提高EMC性能,降低IPM的开关载频是有效的。然而低于8KHZ的载频将会由电机产生单调刺耳的音频噪声,往往会造成听觉疲劳和损伤。
随机脉冲宽度调制(RPWM)是一种有效的解决方法,它改变了电力传送中能量频谱的分布方式,将以固定载频传送时确定的离散的谐波能量分布改变为能量的近似连续的频谱分布。
系统使用ATmega88中的定时器/计数器1的快速PWM模式,相当于边缘对齐的PWM,可以同时改变PWM频率和占空比。如果将载频在一定范围内随机进行变换,而PWM的占空比不变,就可以达到随机脉冲宽度调制的效果,将刺耳的噪声改变为近似的白噪声。
驱动器基准载频f1和输出载频fout的关系表达如下:
fout = f1*(1+Δ)
其中Δ为载频摆动因子,Δ的随机取值范围越大,载频摆动带来的效果越好。设计中驱动器的基准载频f1为5KHZ,Δ为0~0.5,输出载频fout在5KHZ~7.5KHZ之间摆动。软件通过随机函数获得Δ,然后通过简单运算获得PWM频率和占空比参数。MCU具有双缓冲的输出比较寄存器,在下一次定时器溢出后将自动装入新的PWM频率和占空比参数,产生无干扰脉冲,相位正确的PWM输出。
结语
一体化直驱电机的驱动器以高可靠性、小型化和人性化为设计目标,借助微控制器和可编程逻辑器件的高度智能化和可重塑性,以及IPM的高可靠性,使一体化直驱电机的竞争优势得到充分展现;用户接口的进一步扩展和转子定位精度的进一步提高,将有可能使一体化直驱电机进行互联而网络化,实现电子齿轮和电子凸轮的应用。

