131 1300 0010
|
在设计环路补偿时,如果不清楚被控电路的模型或者没有bode图的话一般可以采用PID法来补偿。用仿真验证了一下,PID补偿法确实可以很方便的实现补偿不过存在几个疑惑。
1、PID补偿只是满足了稳定和动态响应,其它特性不能清晰的显现出来。
2、PID中的微分项D好像并不适合开关电源控制。
3、PI可以用于部分开关电源控制不过性能达不到最佳。
|
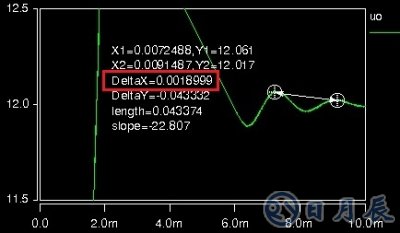
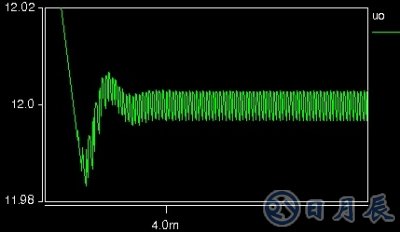
第三步,上一步推测的功率级电路穿越频率约为1000/1.8999=526Hz,最终的目标穿越频率设为8Khz,此时调制比例系数P=8000/526=15(斜率有可能是-1和-2的组合所以P的取值范围15~30)。重复
上述第二步调积分电容使震荡波形达到满意状态为止。